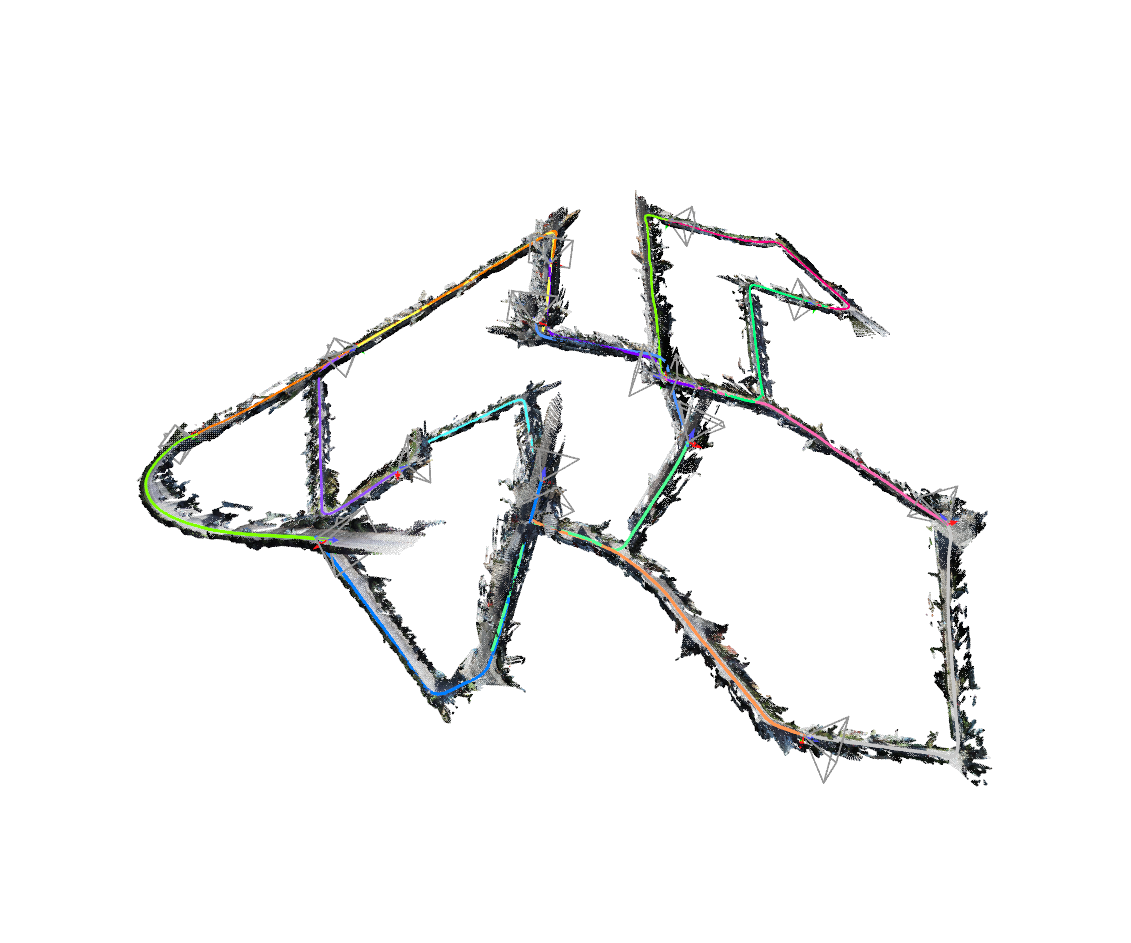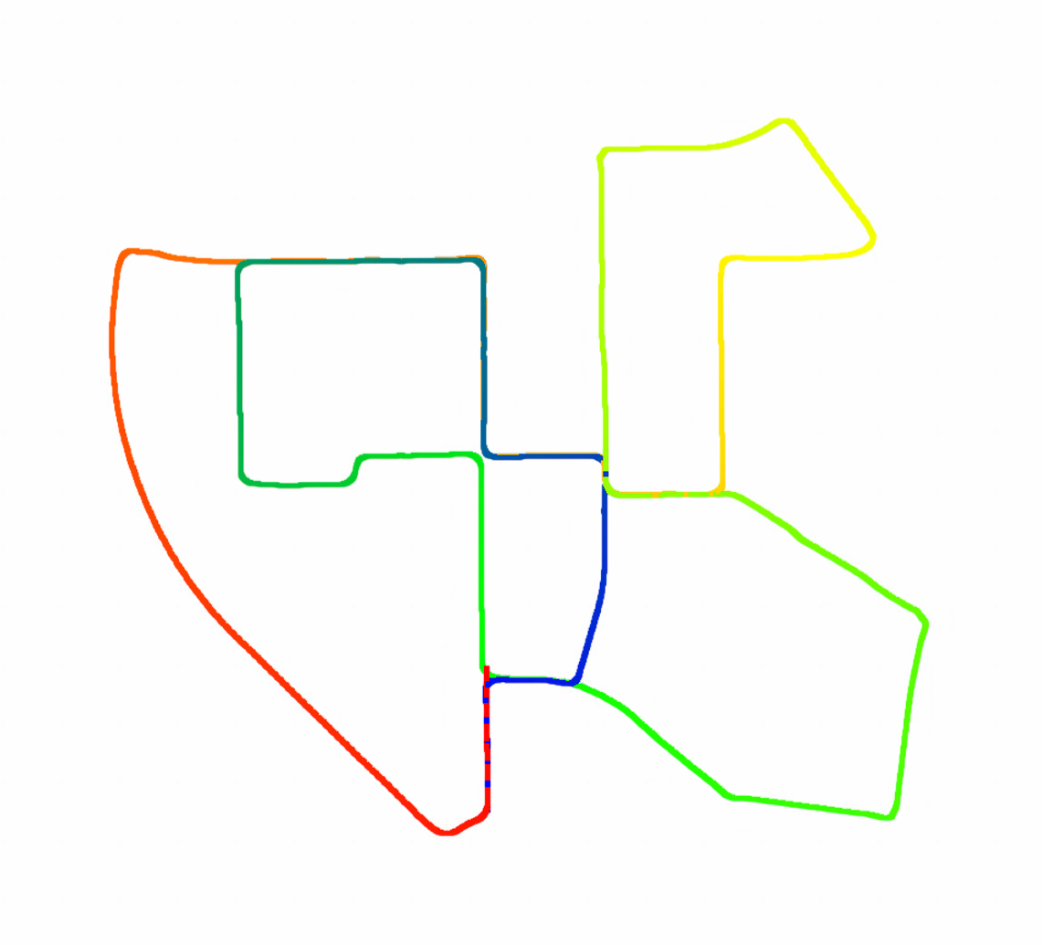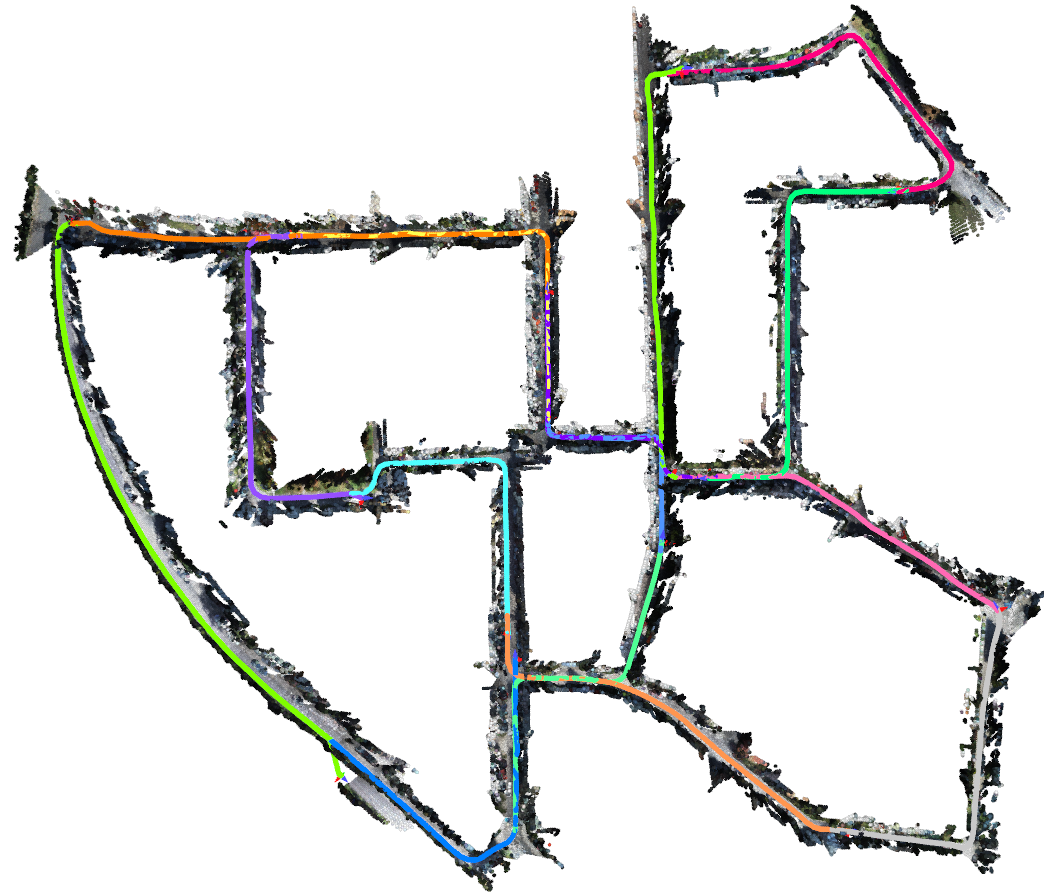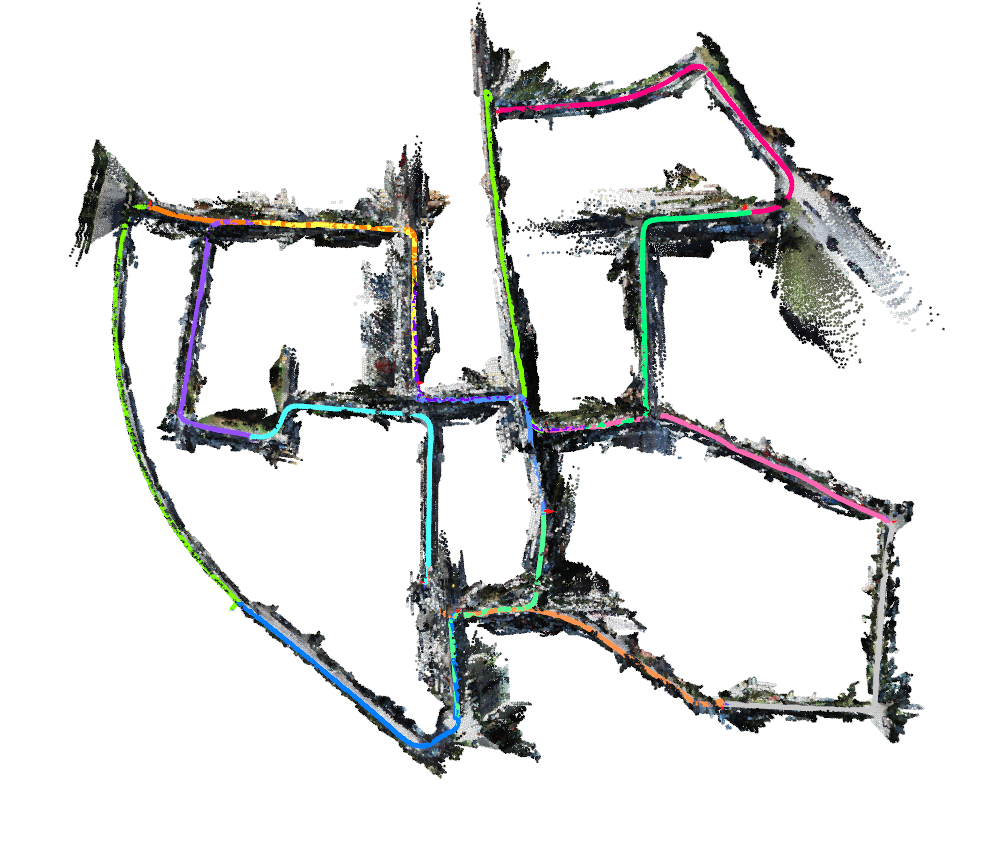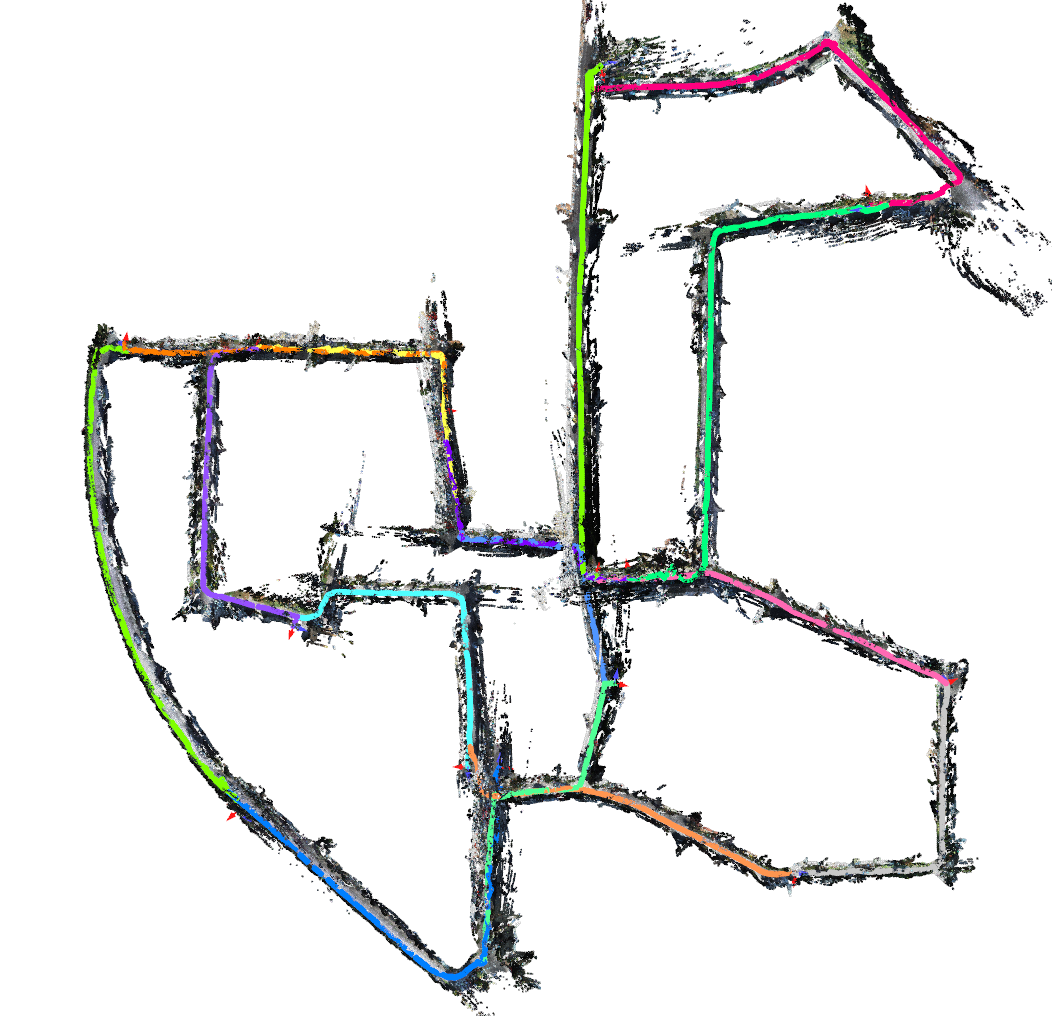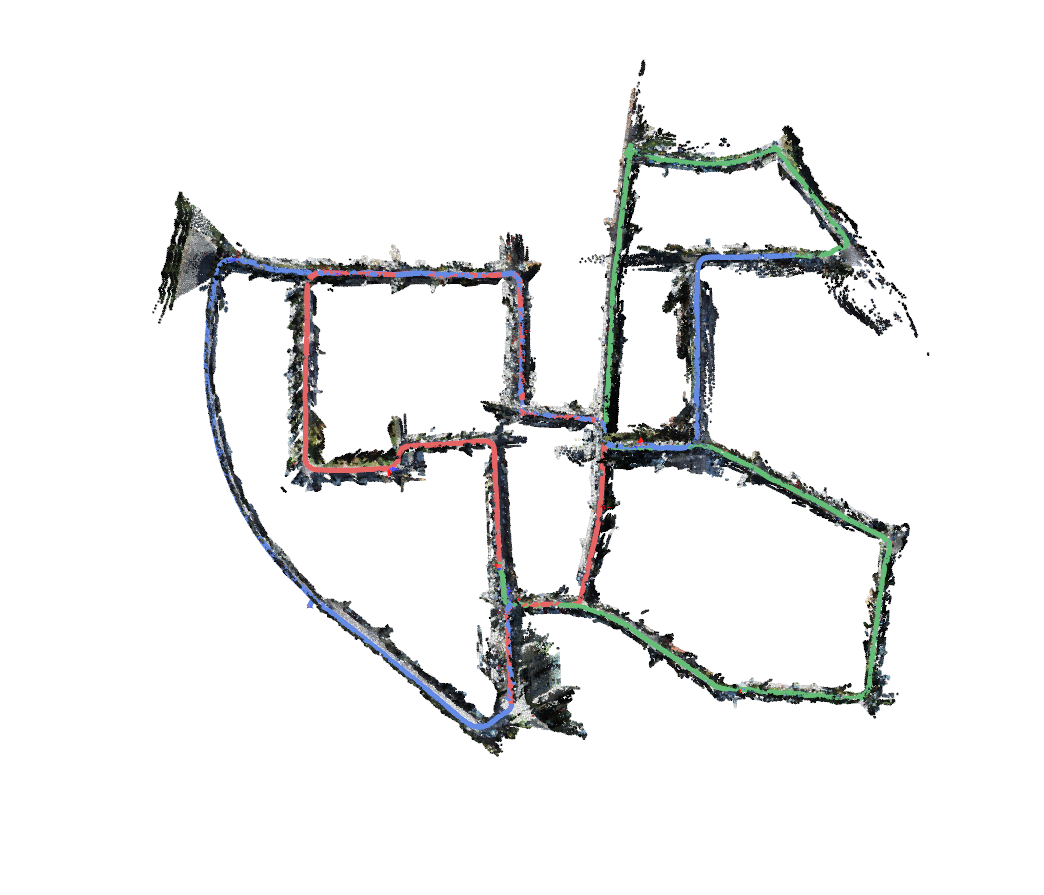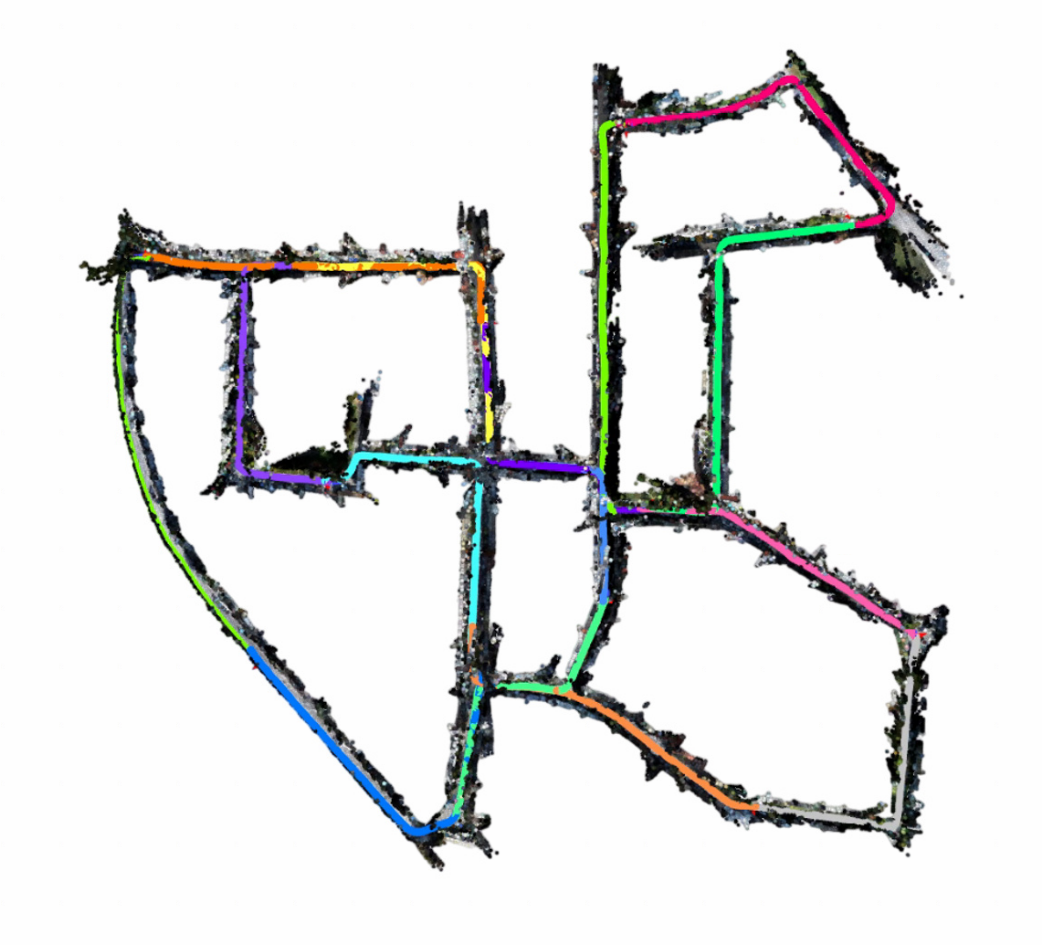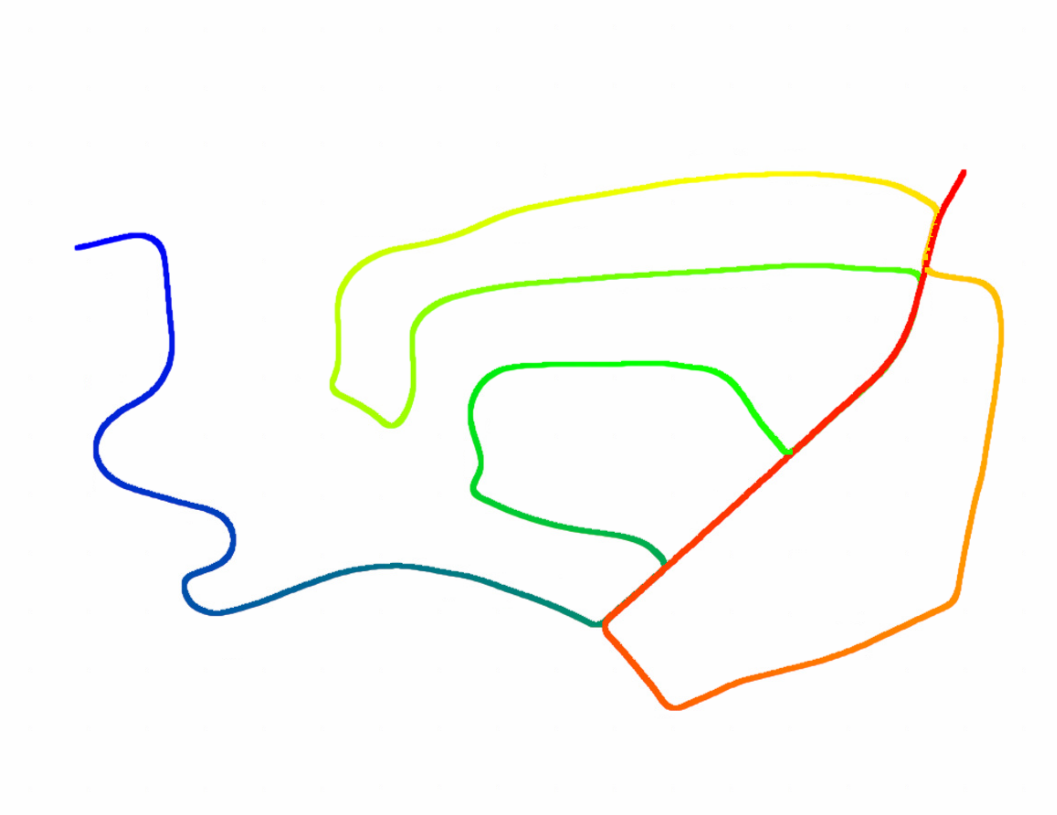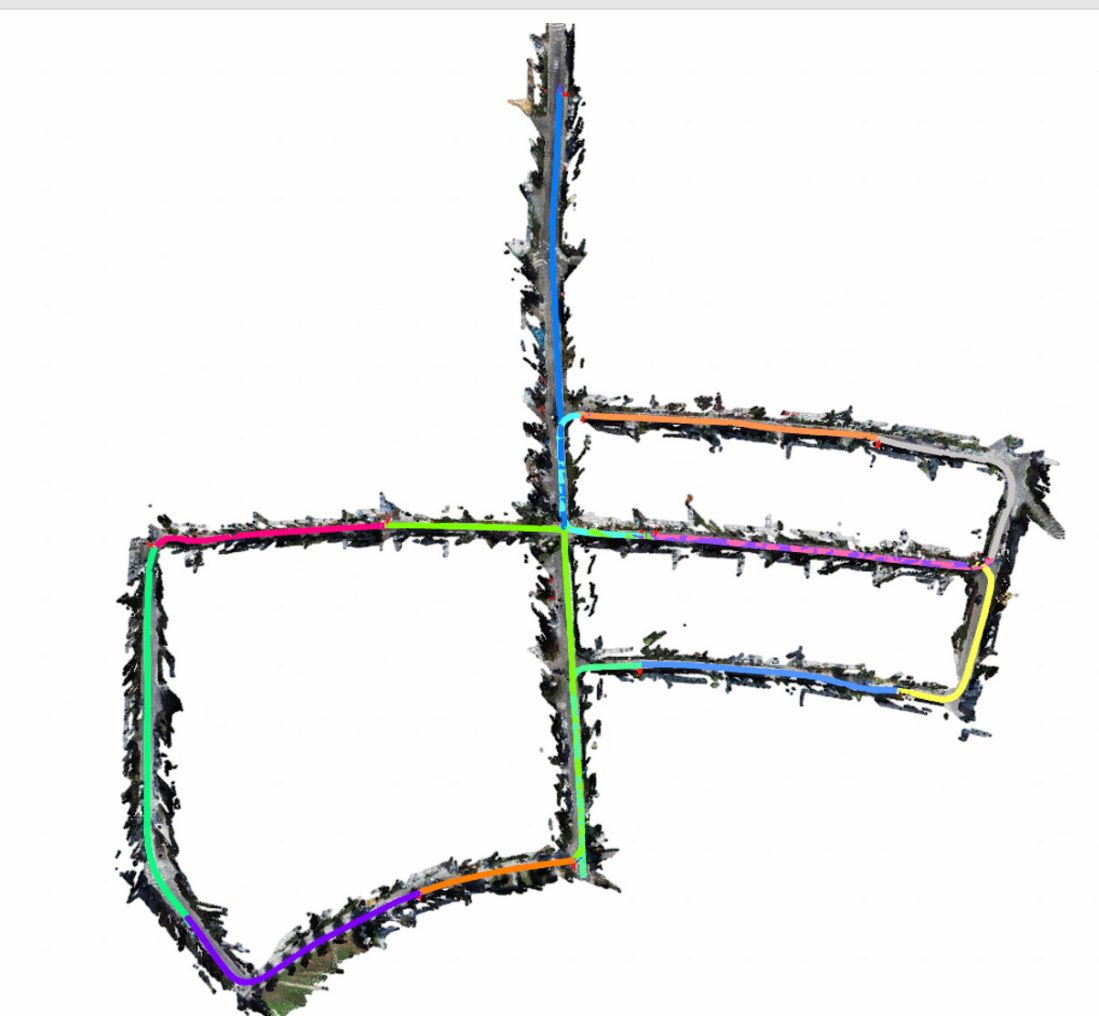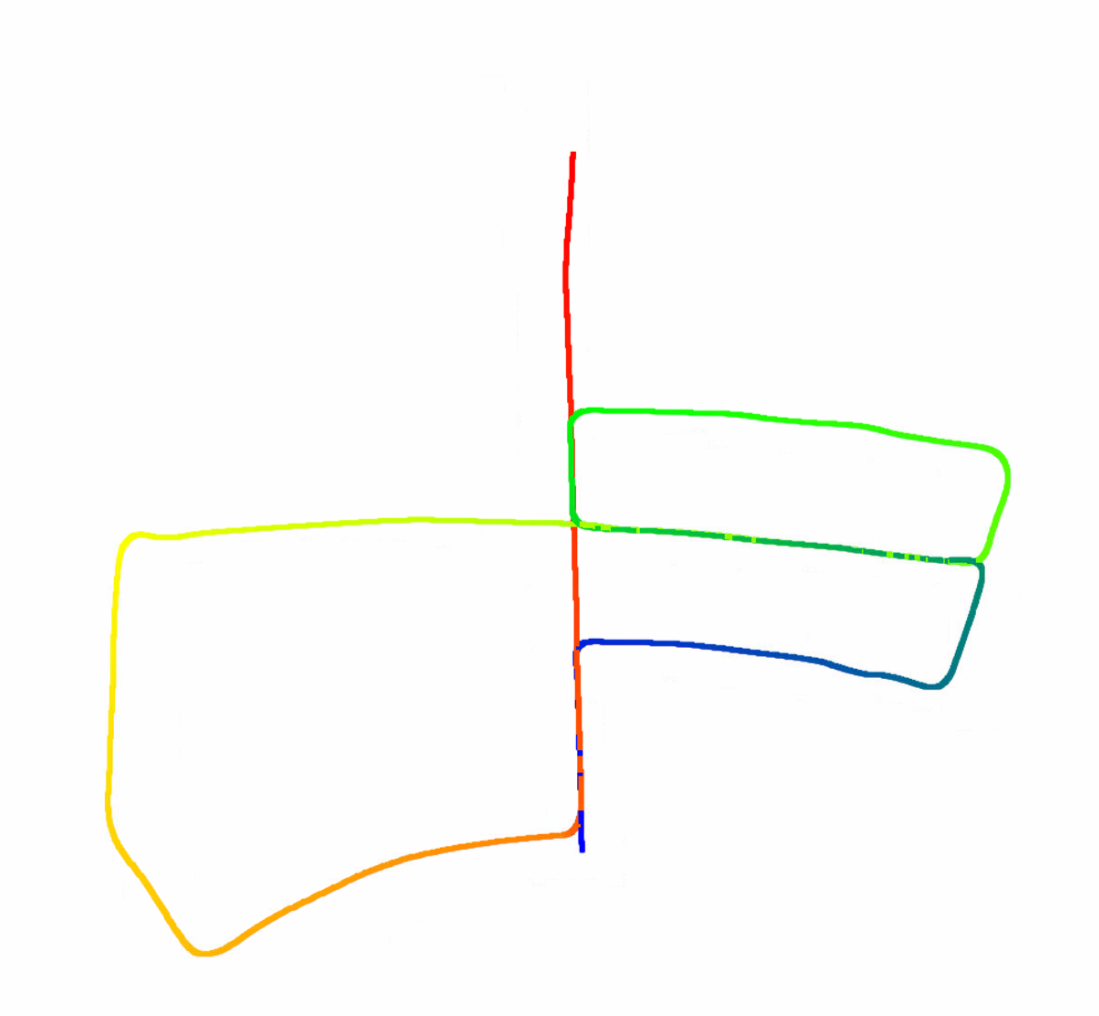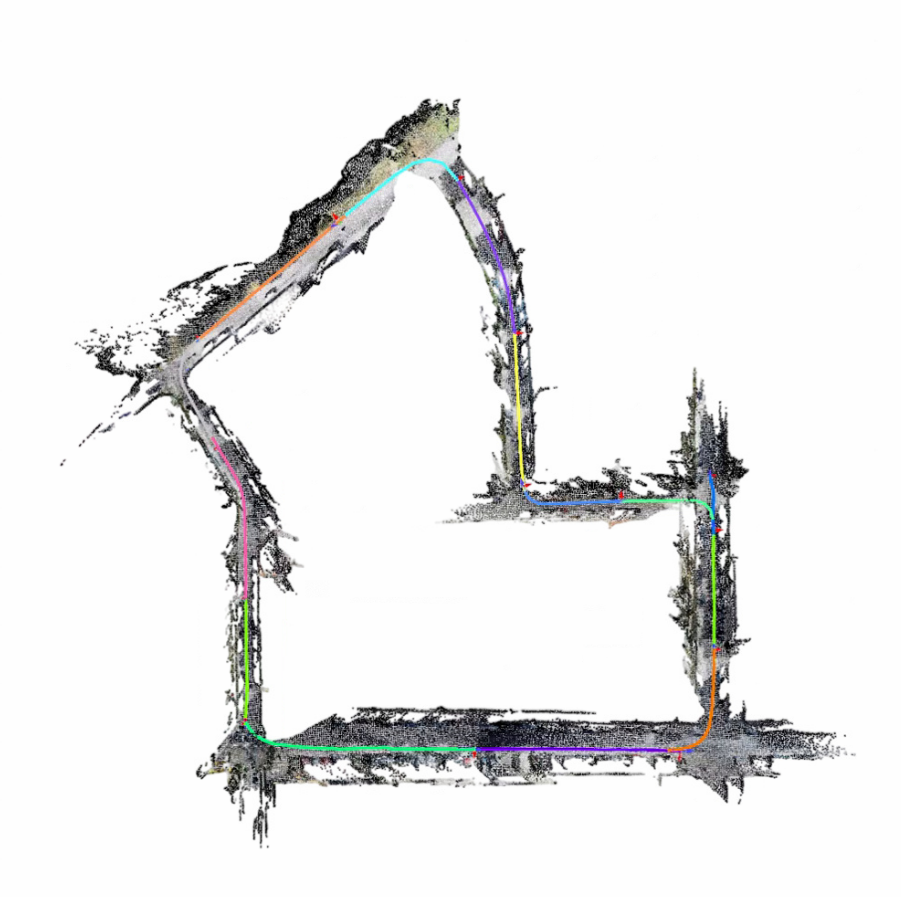
Fig. 1. Real-world heterogeneous multi-robot mapping with MR.ScaleMaster in a multi-floor indoor environment. Four agents — a legged robot ●, a wheeled robot ●, and two handheld cameras ●● — collaboratively build a unified dense 3D map. Inset pairs show inter-agent loop closures across different platforms.